
电 话:010-82895362
传 真:010-82894577
邮 箱:vision2010@cnimage.com
地 址:北京市海淀区上地信息路1号国际科技创业园1—1705
双目相机的工作原理基于视差原理,通过两个并排放置的镜头捕捉同一场景的两幅图像,并利用图像间的差异来计算物体的三维坐标。这种技术不仅提高了图像识别的精度,还使得机器能够更好地理解空间关系,为自动驾驶、机器人导航、三维重建等领域提供了强有力的支持。
在自动驾驶领域,双目相机能够实时感知车辆周围的环境,准确识别行人、车辆、道路标识等障碍物,为自动驾驶系统提供可靠的决策依据。同时,它还能帮助车辆实现精准定位,确保行驶的安全性和稳定性。
在机器人导航方面,双目相机能够构建出机器人的工作环境地图,实现自主避障和路径规划。这使得机器人在复杂环境中能够灵活应对各种挑战,提高作业效率。
此外,双目相机在三维重建领域也发挥着重要作用。通过捕捉物体的多张图像,双目相机能够生成高精度的三维模型,为建筑设计、文物保护、游戏开发等领域提供丰富的视觉素材。

PCI Express 高速工业相机xiB-64系列
USB3.0系列工业和生命科学相机

xiQ USB3.0小型工业相机

Atik Apx60

FireBird Camera Link 图像采集卡 1xCLD-2PE4

CXP图像采集卡CLAXON CXP

CoaXPress-12图像采集卡HawkEye-CXP-12
CAMSIM 仿真卡系列

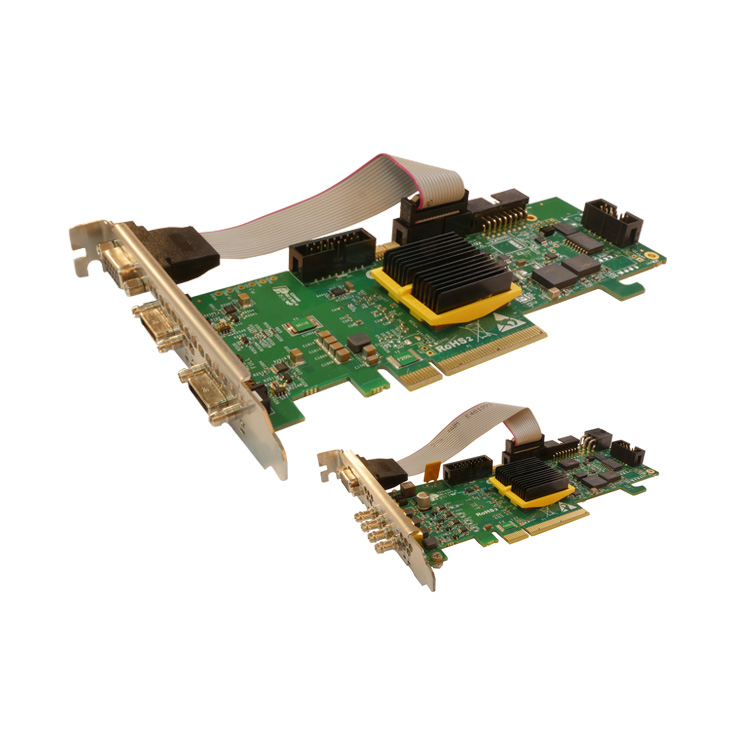
嵌入式 PCI Express总线CameraLink图像采集卡系列

CameraLink光纤适配器PHAST系列

Full CameraLink 光纤延长器/适配器PHOX-FM/FL系列

Camera Link /LVDS、RS-422、HD-SDI接口转换器

Camera Link模拟器

USB3.0自动对焦液态镜头工业相机

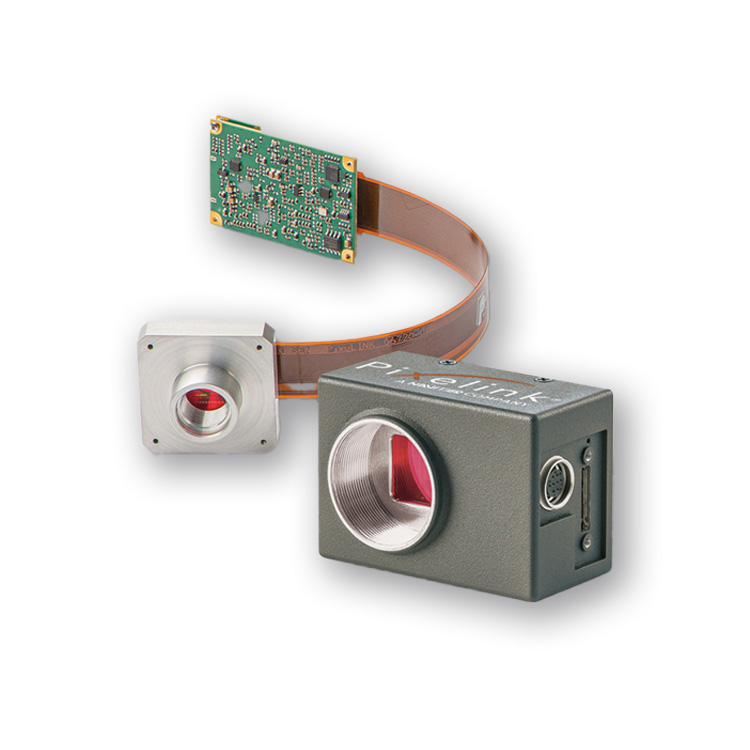
USB迷你微型CMOS工业相机
010-82895362
网址:https://www.cnimage.com
邮箱:vision2010@cnimage.com
地址:北京市海淀区上地信息路1号国际科技创业园1—1705


